The Acoustic Wave Glider
Joseph Luczkovich, Roger Rulifson, Mark Sprague, J.P. Walsh
Departments of Biology, Physics, Geological Sciences, The Harriot College of Arts and Sciences
Institute for Coastal Science and Policy, and UNC Coastal Studies Institute. Contact: [email protected]
The acoustic wave glider (AWG, under construction now by Liquid Robotics, Inc.) will permit research in several acoustic venues including detection of underwater sounds produced by geological, biological and human sources. Low-frequency (< 10 kHz) sounds are emitted by marine animals, with species specific patterns of pulses or frequency modulation (called soniferous species), which include marine mammals, over 800 species of fishes, and some invertebrates. These sounds are either intentionally produced for underwater communication, or are incidental to swimming and feeding, and have been used to gain information on the behavior and location of the sound-producing animals. In addition, individual animals have been acoustically tagged by biologists, allowing their location to be determined with known accuracy. Acoustic tags being attached to animals use high-frequency (~69 kHz) sound emissions with a unique pattern of coded pulses associated with the tagged animal. This has facilitated observations of animal migrations in coastal waters and tagging networks have been established on both the Atlantic and Pacific coasts to understand the movements of the tagged animals. Humans have altered the ocean soundscapes in the course of fishing, shipping, transportation, offshore energy exploration, military activities, and recreation. The acoustic wave glider will allow a description of the sea soundscape, the patterns of fish and whale migrations, and animal location data.
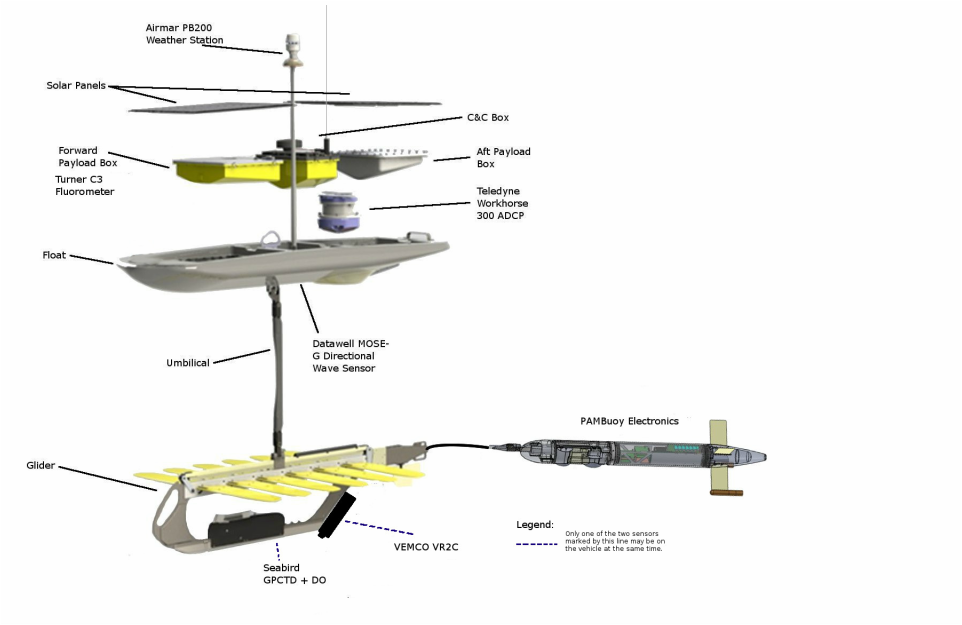
AWG Components: AWG consists of a surface unit (wave glider float) and a submarine unit (glider). It comes standard with several components and sensors. Standard surface components (wave glider float) include a command and control (C&C) computer, an AIS (Automatic Identification System) marine traffic receiver, Airmar CS4500 Ultrasonic Water Speed Sensor, Airmar PB200 weather station, Datawell MOSE-G Directional Wave Sensor, Iridium satellite data modem, two solar panels (each 80 W). Sensors to be included in the surface float are a Turner C3 fluorometer and an Acoustic Doppler Current Profiler (ADCP, Teledyne RDI WHM300). A Seabird Conductivity Temperature and Dissolved Oxygen sensor (GPCTP) will be mounted on the underwater glider and the VEMCO VR2C active tag-acoustic receiver. Mounted in a tow body behind the glider will be the Pambuoy Passive Acoustic Module (PAM) consisting of Reson TC-4014-5 (high-frequency) hydrophone, solid state hard drive, and integrated digital processor to be programmed for event detection using RTDC software.
News reports from our first deployments
News release about the ECU Wave Glider Deployments http://www.ecu.edu/cs-admin/news/waveglider.cfm
|
| ||
|
Fish sounds recorded during our sea trials
|
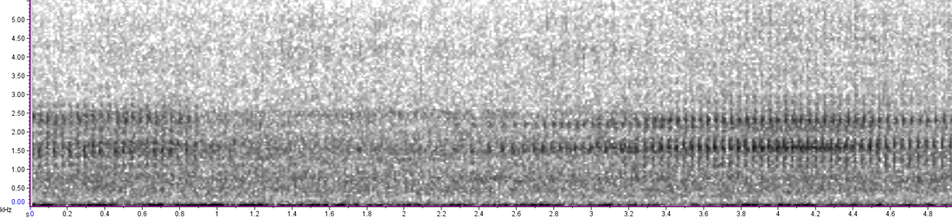
Striped cusk eels, Ophididon marginatum, chattering sounds
|
The first recording of a new sound recorded by the Decimus towbody on a deployment is shown below. The "honking" of a sea robin, Prionotus sp.
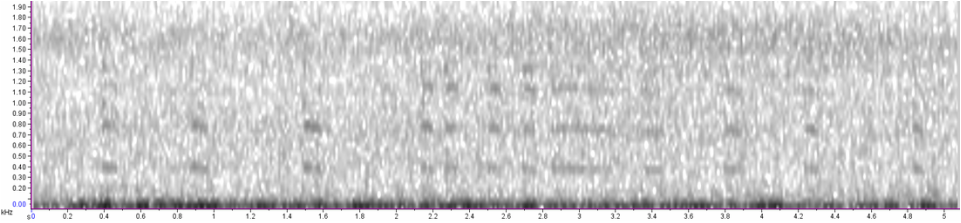
Spectrogram of the sea robin "honking" as seen on the computer output of Decimus system.
|
Acoustic Wave Glider Data Sheet
|
| ||

Funding provided by the National Science Foundation under Major Research Instrumentation Grant to East Carolina University.